Adjusting your UGPS systems configuration and settings🔗
The setup in the GUI needs to mirror your actual setup in the real world for your positioning information to be correct. In the GUI there are two systems that needs to be adjusted; the Baseline and the Settings.
In the Baseline window in the GUI, you adjust the placement of your antenna/receivers in relation to the topside box. In the Settings window you choose which locator you are using and the placement of the topside in the environment.
Baseline settings🔗
Go to Baseline from the left menu in the GUI. In the tab at the top select antenna or receivers according to whether an antenna or loose receivers are used.
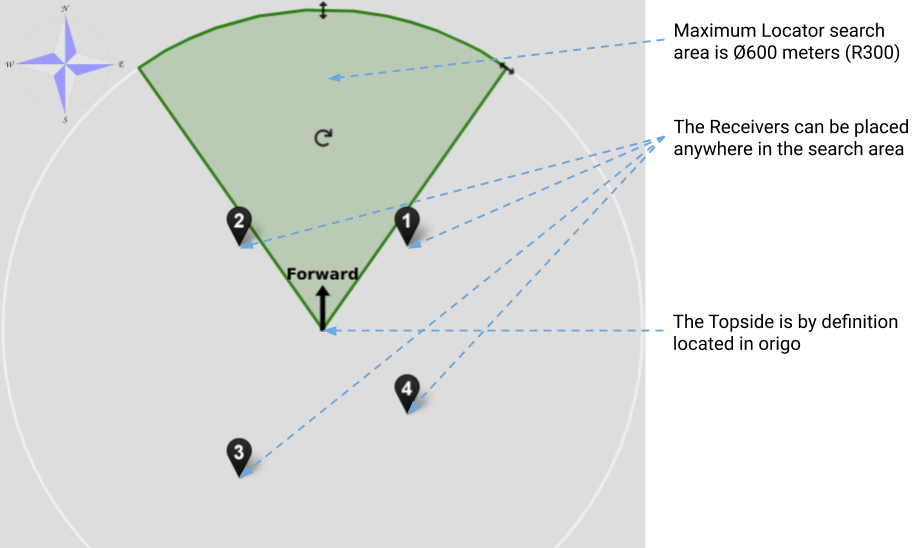
In the receiver view, in the graphical configuration panel, you either drag and drop the receivers to their actual position in relation to the topside, or you fill in the position manually in the input fields below the panel. (You might need to drag the receivers apart for the manual input fields to become visible) Remember to fill inn the receivers depth.
In the antenna view you need to open Advanced Settings to fill in the position of the antenna in relation to the topside.
Improved positioning will likely be obtained by limiting the search area : Restrict the search area as far as possible by dragging and dropping the arrows in the graphical configuration panel.
Locator and topside settings🔗
Cofigurations of the topside and locator settings is conducted in Settings, from the left menu in the GUI.
Locator settings🔗
Select the type of locator (U1, A1, or D1) which you are using, and which channel you wish to use.
Note
If using the U1 locator, the channel must match the rotary switch at the back of the U1 (screw the lid completely off to access the switch).
Channel overview🔗
The frequency bands of the available channels are as follows. Lower frequency typically corresponds to greater range due to less acoustic absorption, though there are other factors involved: if you experience issues with signal quality (low RSSI or high NSD), try a different channel. Often channel 3 is recommended.
| From (kHz) | To (kHz) | Channel |
|---|---|---|
| 31.25 | 62.5 | 1 |
| 62.5 | 93.75 | 2 |
| 93.75 | 125.0 | 3 |
| 125.0 | 156.25 | 4 |
| 156.25 | 187.5 | 5 |
| 187.5 | 218.75 | 6 |
| 218.75 | 250.0 | 7 |
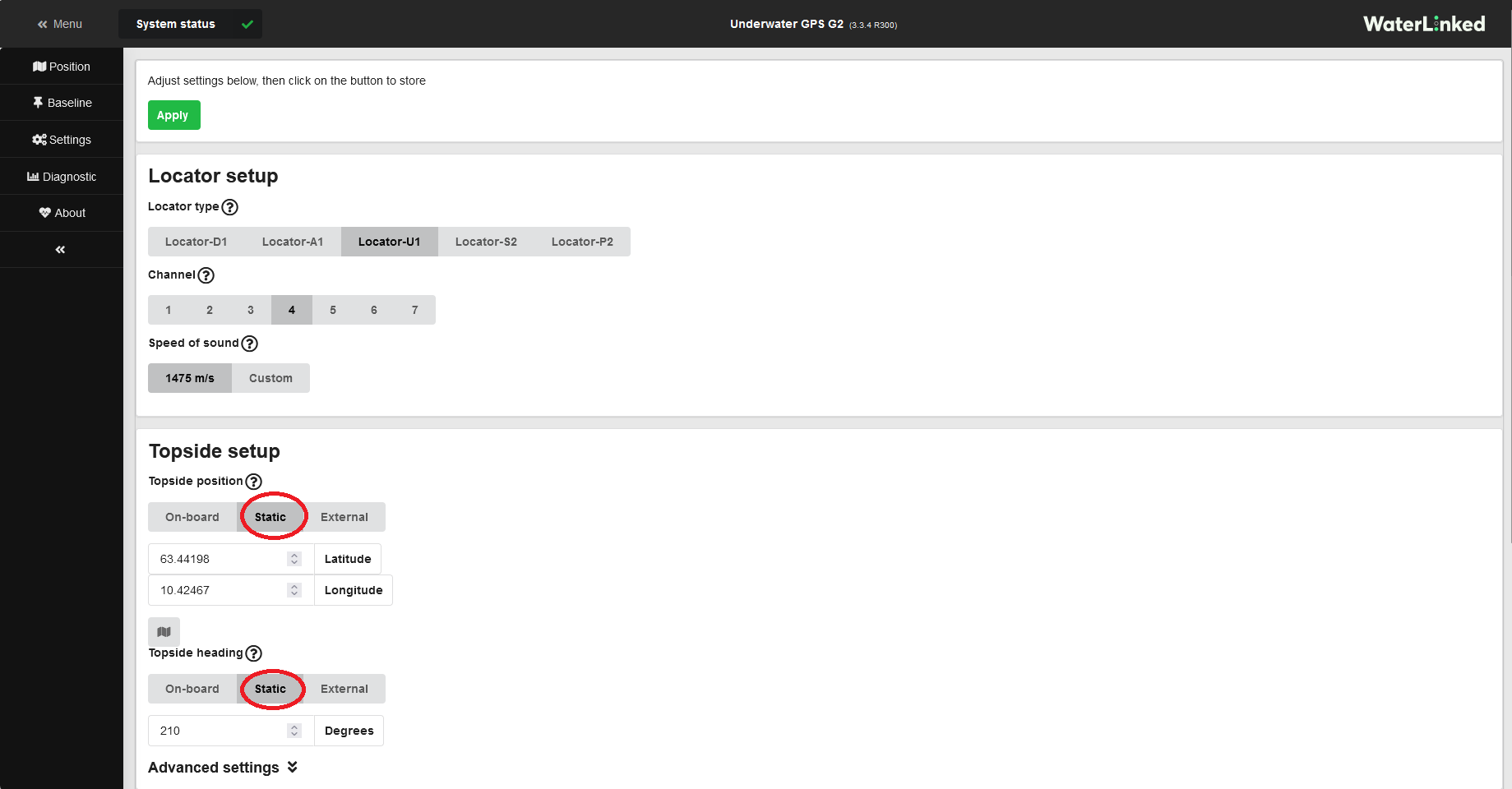
Topside settings🔗
The default source for the topside position and heading is On-board. This configuration should be chosen if the topside is located in any dynamic environment, like on a boat or similar.
If the topside unit/antenna is at a globally stationary position (like a jetty) the static configuration of position and heading will give best accuracy of the system. Below you can see how the position and heading is set to static. Clicking on the map button opens a map window to help you input the static position.
IMU calibration🔗
The link "Onboard IMU calibration" takes you to a window where you can reset the gyros and set the heading manually.
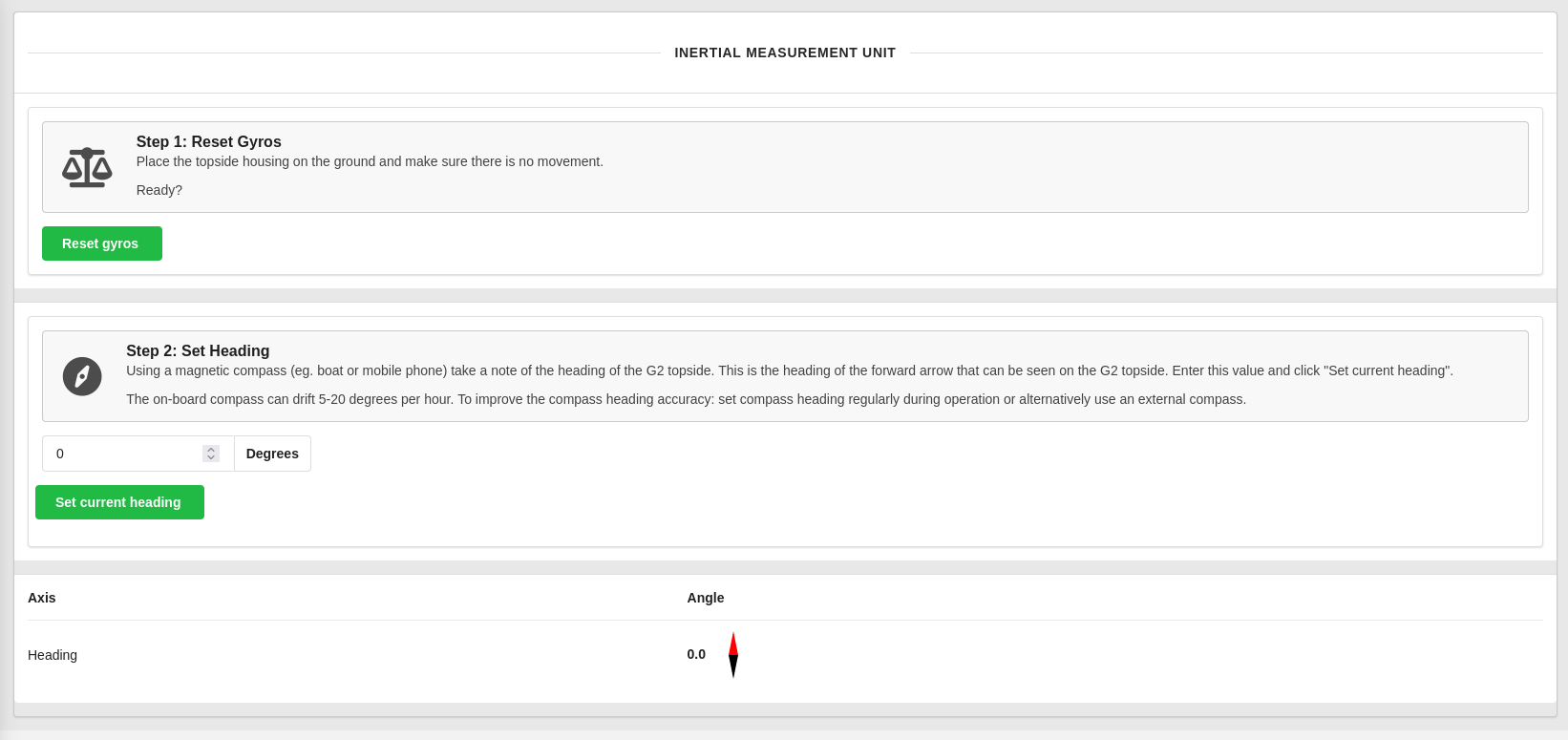 It is advisable to reset the gyros before every use. Place the topside on a static horisontal area and press "Reset gyros.
It is advisable to reset the gyros before every use. Place the topside on a static horisontal area and press "Reset gyros.
The topsides heading has to be set manually. Use a decent compass and enter the heading in the heading filed, and press "set current heading".
Note
When you are using On-board positioning the heading has to be set periodically, as the IMU will drift over time.
For best performance on boats or similar, with a moving topside unit, we recommend to use an exteranl input of heading data (e.g. from a GPS compass) as well as global position data. An external device will likely be more accurate than the topside unit's built-in GPS receiver and IMU. For a thorough description on how to do this, see External Compass
User preferences🔗
Select whether to use metric or imperial units, and/or if you would like a dummy boat to be displayed on the map and receiver configuration pages.
Advanced settings🔗
Advanced settings allows you to configure ethernet and wifi.